RM Vision 5
读取图片
- 视频
- 相机
相机模型
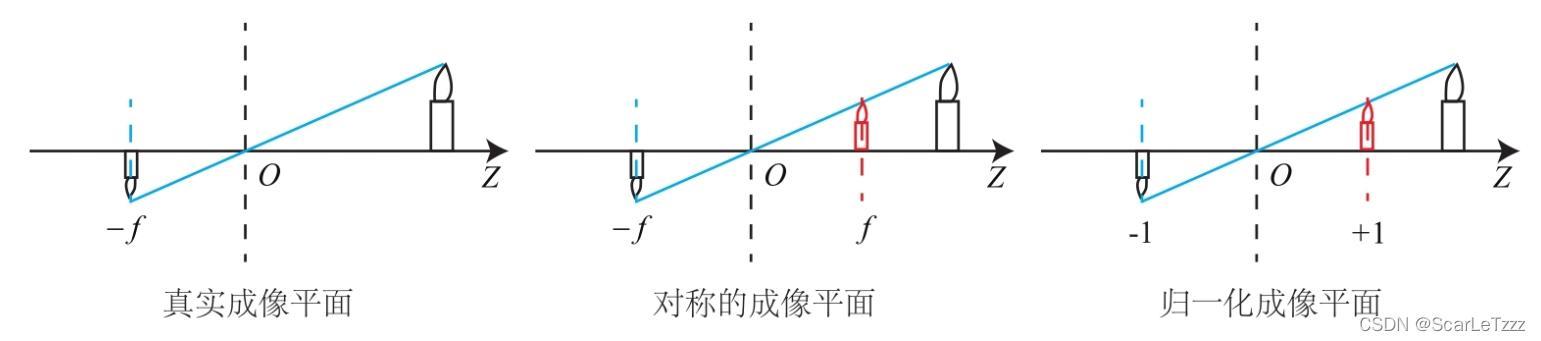
相机成像,就是将世界坐标系中的坐标点映射到二维像素平面
小孔成像模型如图:
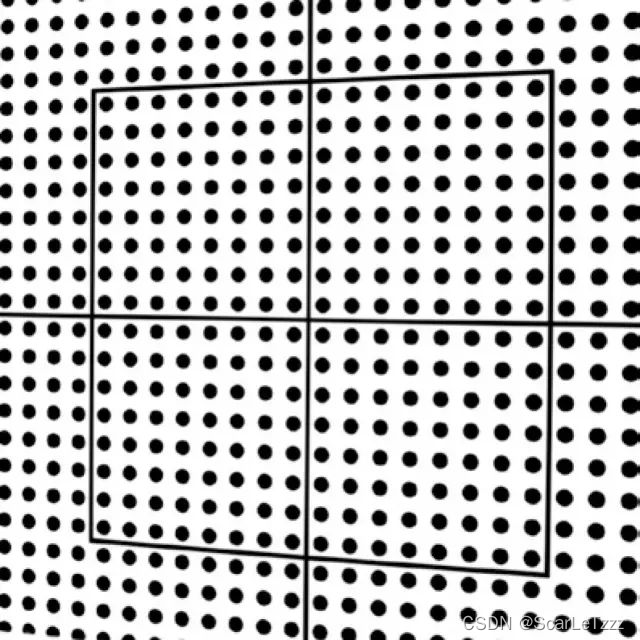
畸变:
(1)径向畸变:
穿过透镜中心的光线不产生畸变,而穿过透镜边缘的光线会导致畸变
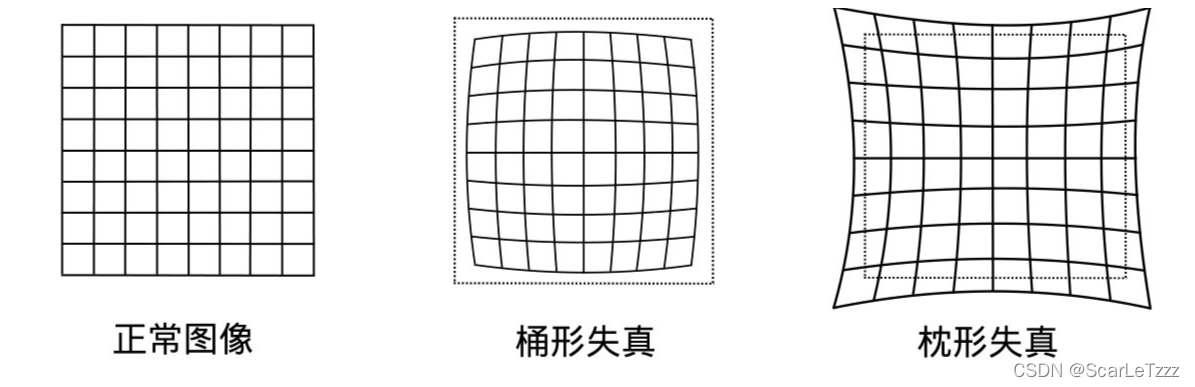
(2)切向畸变:
透镜与图像平面不平行
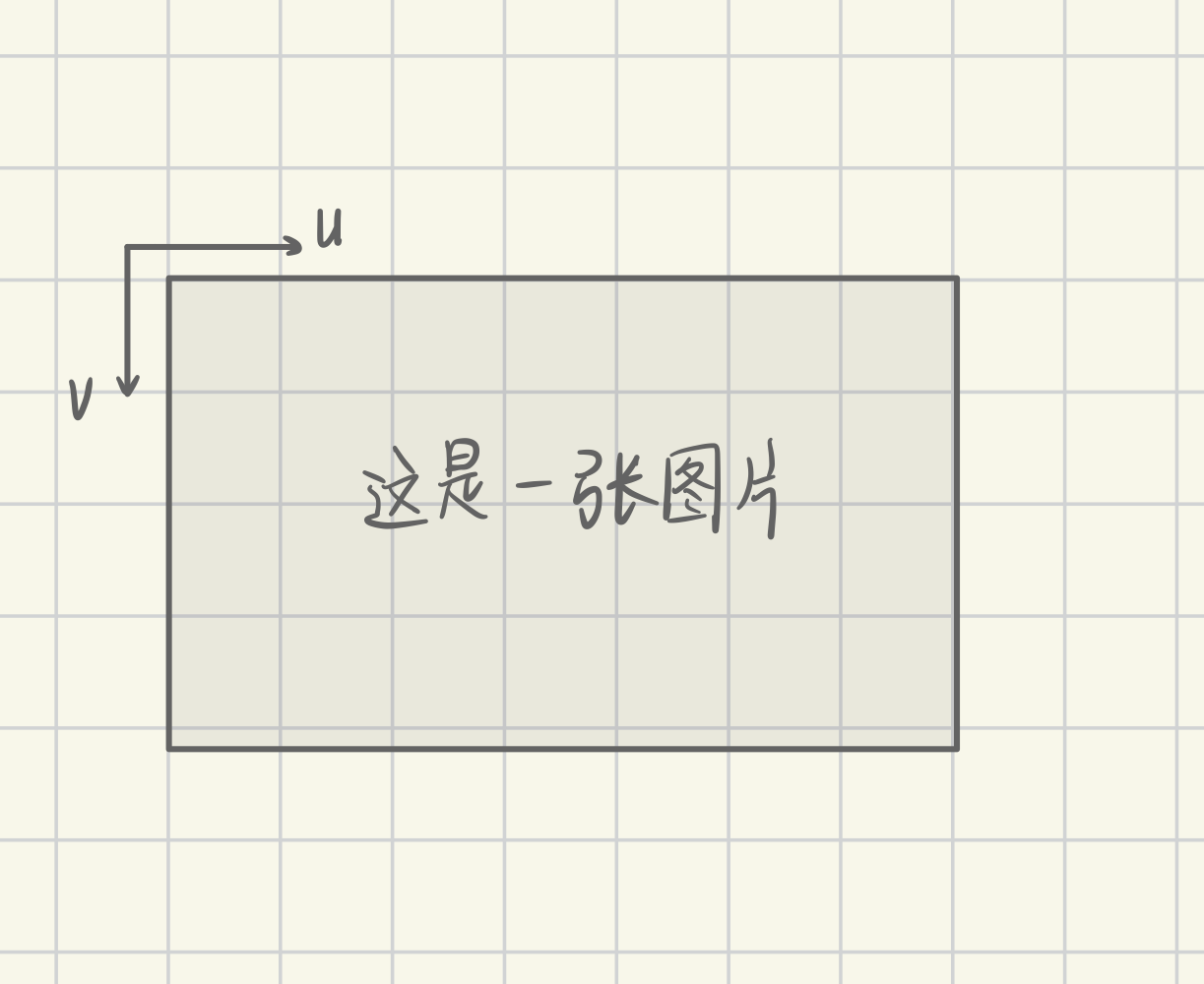
- 像素坐标系如图:
相机标定
获得内参矩阵和畸变系数
使用 MATLAB 的工具箱 照片可以连接相机后用 MVS 拍 具体操作可以参考 海康相机注意事项
PnP原理:Perspective-n-Point
求 R 和 t R:旋转矩阵 t:平移向量
已知:
像素坐标系下角点坐标(可以通过内参矩阵 K 转换为相机坐标系下角点坐标) 装甲板坐标系下角点坐标:小装甲板长135cm 宽56cm
内参矩阵(可标定得到):
畸变系数(可标定得到):
坐标变换:
如下图所示,完成了像素坐标系到相机坐标系的转换 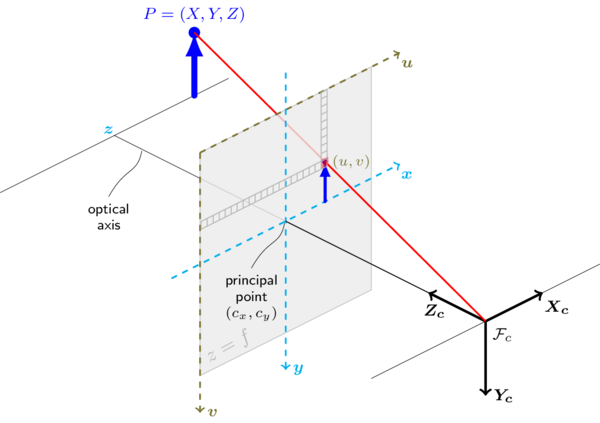
推导如图: 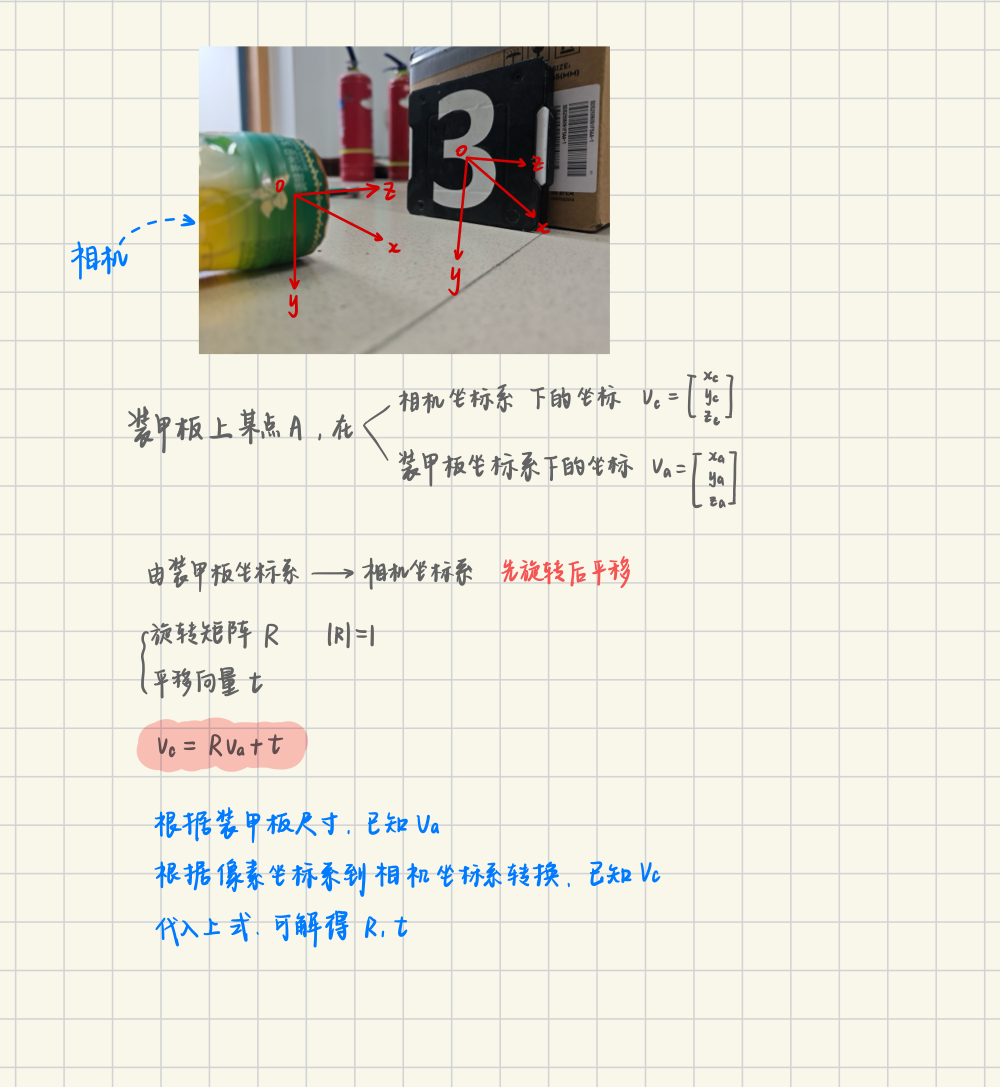
Model
经验来看 mlp LeNet ResNet 都可完成任务
我讲的烂,推荐大家去看《动手学习深度学习》 对应第四章,第六章,第七章
大作业内容
分为四个level:
- 支持调用本地视频和相机实时取流,完成稳定识别装甲板
- 完成pnp结算,求出装甲板的在相机坐标系下的坐标
- 训练模型,检测装甲板数字,提高装甲板的识别精度
- 使用ROS2实现上述功能
验收标准:
- 线下验收
- 至少完成level1
- 代码清晰,结构合理
提交内容:
- 代码,不包含编译内容
- 文档和视频,展示效果
本文档部分图片参考:https://blog.csdn.net/qq_40918859/article/details/122271381